Bhavesh Parkhe
Control Systems | Autonomous Vehicles | Aspiring Minimalist
MS in Mechanical Engineering
University of Masscussetts Amherst
Home
About me
Projects
Resume/CV
LinkedIn Profile
Github Profile
Google Scholar
Autonomous Bot for MIT Duckietown
Project description: This project was aimed at recreating the self driving car systems in a miniature town and explore the problems faced by the sensing components on the road. To have a standard design and testing environment, this project was implemented within the specifications of the Duckietown Project which was initiated by Massachusetts Institute of Technology. Due to this being a part of a fast paced course, least resistance methods to implement a working model were preferred. The basic elements that were used
1. Implementing Odometry using IR sensors
Odometry is the use of data from motion sensors to estimate change in position over time. For this project we used IR sensors which can detect the reflectance of a surface that it faces. We then placed black and white quadrature circles in front of then near the wheel hub which will cause a change in current each time it switches colors. The counts of each switch were recorded using the Arduino and speed and distance were calculated.


2. Cruise control(obstruction detection) using ping sensors
To detect obstruction directly ahead of the vehicle, we used a ping sensor which works on the principle of ultrasound. A Proportional deviative control was implmented to cntrol the motor drive based on the distance output from the ping sensor.

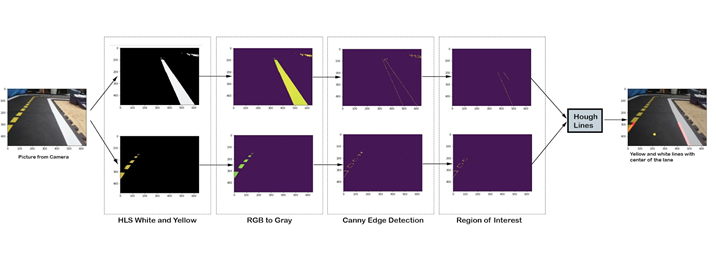
3. Lane Finding and PD control using PiCamera
Final Test Run
Brownie points for being cool
..and, no he is not crazy, we had him tested :)