Bhavesh Parkhe
Control Systems | Autonomous Vehicles | Aspiring Minimalist
MS in Mechanical Engineering
University of Masscussetts Amherst
Home
About me
Projects
Resume/CV
LinkedIn Profile
Github Profile
Google Scholar
Advanced Lane Finding Project
Project description: This project was executed as a part of my Udacity Self Driving Car Nanodegree. The below project was part of module 2 where we improve upon our previous implementation of lane finding. The previous algorithm had problems with detecting higher order curvatures and detecting lane lines on a concrete road. I used indvidual images to show the steps and then the implemtation of the final video is included as well.

Undistort and perspective transform
First we preform an undistort to account for distortion due to the camera lenses. This the first and the most basicestep before we proceed with curvature calculations

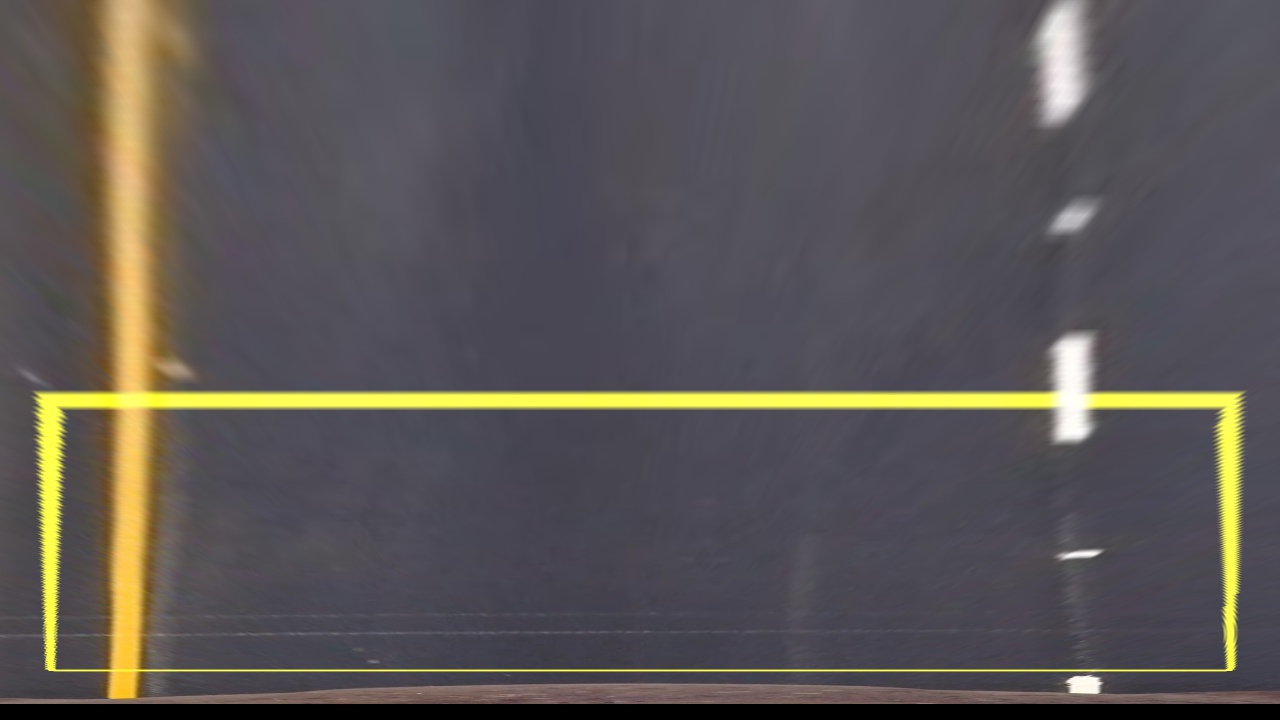
Then I use a perpective transform to convert this image into a birds-eye view of the lane. The rendintion is not always accurate, but we check for this by looking at the perspective transform of a near straight lane. Its transform shoould be close to vertical lines.

Color and Gradient Thresholds
By applying HLS color gradients and Sobel Gradient Transform we get the below image where we can easily extract the lanes for further processing.

Curvature Measurement
After applying the perspective transform and color threshold, we get a image similar to the one below. This is for a section of the the lane where there were cracks in the concrete and shadows from nearby trees. Hovewer, these are ignored and only the red and blue colored pixles are used for lane identification.
A 2nd order polynomial is fitted to these points (yellow). A spline can also be fitted for roads with uneven curves.

